
Research
The aim of our research group is to develop robots that can interact with the physical world safely and robustly. We leverage high-resolution tactile sensing, visual understanding of objects in the scenes and robot learning to enable the robots to have such desirable capabilities.
Multiple Dynamic Movement Primitives Coupled Generalization
 | Coupled Multiple Dynamic Movement Primitives Generalization for Deformable Object Manipulation. |
Motion planning and control on the soft object manipulation
 | Cooperative Manipulation of Soft Objects with Formation Preservation Based on Dynamic Movement Primitives. |
Human robot cooperatively soft manipulation
 | Coupled Multiple Dynamic Movement Primitives Generalization for Deformable Object Manipulation. |
Optimization based deformable object manipulation
 | Automated Folding of a Deformable Thin Object through Robot Manipulators. By using the Levenberg–Marquardt algorithm, |
Acquiring depth information in a distorted environment
 | The Unscented Kalman Filter (UKF) technique is used to estimate the 3D coordinate of the manipulator’s tip. |
##################################################
Motion planning and control on the soft object manipulation
 Transporting soft objects while preserving formation uses dynamic movement primitives.
Transporting soft objects while preserving formation uses dynamic movement primitives.
Human robot cooperatively soft manipulation
 Drive the soft robot into the desired configuration with the collaboration of human and robots.
Drive the soft robot into the desired configuration with the collaboration of human and robots.
Optimization based deformable object manipulation
 Automated Folding of a Deformable Thin Object through Robot Manipulators. By using the Levenberg–Marquardt algorithm, the task of folding a deformable thin object can be reformulated as a convex optimization problem.
Automated Folding of a Deformable Thin Object through Robot Manipulators. By using the Levenberg–Marquardt algorithm, the task of folding a deformable thin object can be reformulated as a convex optimization problem.
Acquiring depth information in a distorted environment
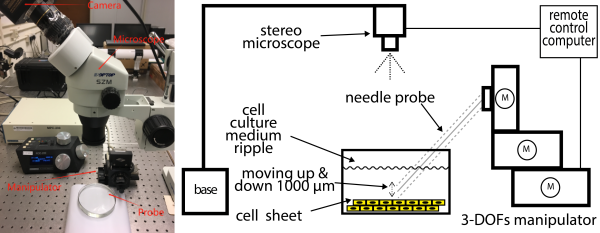 The Unscented Kalman Filter (UKF) technique is used to estimate the 3D coordinate of the manipulator’s tip. –>
The Unscented Kalman Filter (UKF) technique is used to estimate the 3D coordinate of the manipulator’s tip. –>