
Research
Deep Reinforcement Learning (DRL) for Enhanced Cable Routing: A Fusion of Tactile and Visual Sensing
 |
Dynamic Coordination of Dynamic Movement Primitives (DMP): A Trajectory Planning Approach for Deformable Object Manipulation
 |
Dynamic Movement Primitives (DMP) for Maintaining Formation Integrity during Soft Object Transportation
 |
Synergistic Human-Robot Collaboration for Achieving Desired Soft Robot Configurations
 |
Enhancing Deformable Thin Film Folding Through Convex Pattern Optimization
 |
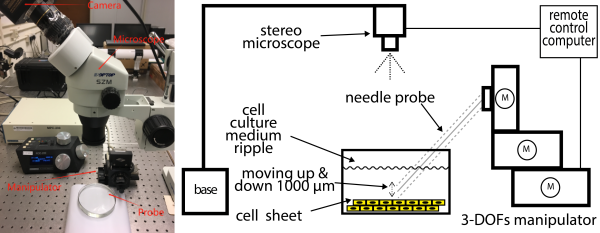
3D Coordinate Estimation of Manipulator Tip Using Unscented Kalman Filtering(UKF)
 |